
最近、電子工作が面白くて勉強会に時々参加しています。
Arduinoを使って、LEDを光らせたり、温度を計ったり、モーターを制御したり、、、ということをやるのです。
先日参加した勉強会の休憩時間に、みんなでお茶を飲みつつ、メモしてあった電子工作のアイディアをいくつか話してみました。
その中のひとつが、これです。
↓ ↓ ↓
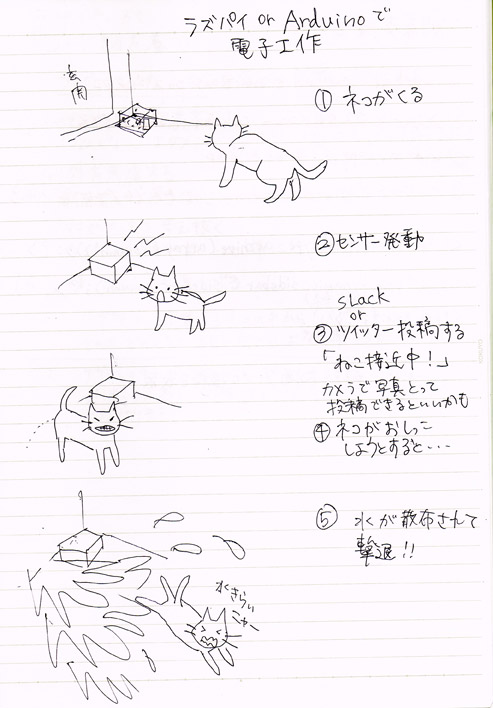
今住んでいるマンションのお隣さん家の玄関の前で、毎日オシッコをする猫がいて困っていたので、これを電子工作で解決できないかな?と考えていたのです。
でもLEDを光らせるだけで喜んでいる私ではまだまだ知識も足りないし、とりあえずこんなこと考えてますよ、ということを伝えただけのつもりでした。
すると、
数日後にこんなブログが書かれていた
なんと・・・本当に作っちゃったんですってよ!奥さん(´⊙ω⊙`)!
このブログを書いたのは、「電子工作で遊ぶ会」を主催してくれた人、河野 明日旭さん。

「動くものが近づくと水が出る」という機能を実装するには、人感センサー(というか、モーションセンサー?)を使うんだろうなーということは想像していました。
でも、問題がありまして。
ネコが近づいた時に水をかけるのはいいけど、人間が通るたびに水をかけられるのはマズい
ということです。
玄関のドアを開けるたびに、水をかけられてたらたまりませんよね。
ネコであることを判別するにはどうしたらいいんだろう?
・・・顔認識?
・・・いやいや、そんな大掛かりなことは無理。
↑ ↑ ↑
私はこのくらいの思考回路でストップしていました。
河野さんが考えたのは、コレです。

これがどういうことかといいますと、
– それ以外の時には、水を出さない
という風にするのです!
つまり、水鉄砲自体は地面から30センチくらいの場所に固定しておき、人間が通ったときには両方のセンサーが同時に感知するので、水がでることはない。というわけです。
カ・ン・ペ・キ!!
ちなみにコードはこちらです。
#define MOTOR_PIN 10
#define UP_SENSOR_PIN 11
#define DOWN_SENSOR_PIN 12
#define LED_PIN 13
boolean up_sensor_val = LOW;
boolean down_sensor_val = LOW;
void setup() {
// Serial.begin(9600);
pinMode(MOTOR_PIN, OUTPUT);
pinMode(UP_SENSOR_PIN, INPUT);
pinMode(DOWN_SENSOR_PIN, INPUT);
pinMode(LED_PIN, OUTPUT);
}
void loop() {
digitalWrite(LED_PIN, HIGH);
up_sensor_val = digitalRead(UP_SENSOR_PIN);
down_sensor_val = digitalRead(DOWN_SENSOR_PIN);
// Serial.println(up_sensor_val);
// Serial.println(down_sensor_val);
delay(10);
digitalWrite(LED_PIN, LOW);
if ( up_sensor_val == LOW &&
down_sensor_val == HIGH ) {
// Serial.println("ON!");
digitalWrite(MOTOR_PIN, HIGH);
delay(2000);
digitalWrite(MOTOR_PIN, LOW);
delay(3000);
} else {
// Serial.println("OFF");
digitalWrite(MOTOR_PIN, LOW);
delay(5000);
}
}
実際の水鉄砲はこんな感じです。上部の黒い箱の中にArduino Pro
と人感センサーが入っています。

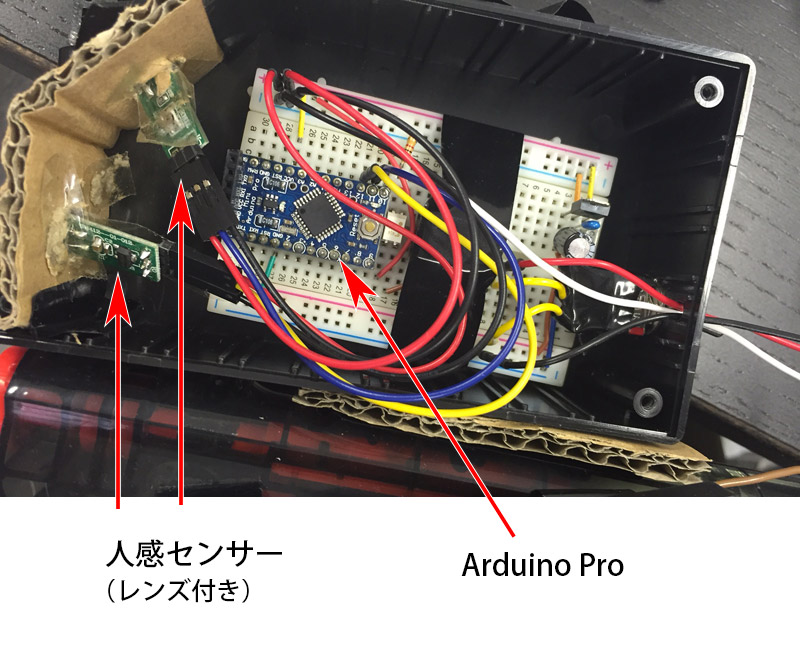
主な部品
Arduino Pro
人感センサー
安定の秋月電子。2個使います。

動画がありますので、ご覧ください!!
もおおお・・・ホントすごいです。
ちなみに、河野さんは、自宅で太陽光発電をしており、その発電で実際に洗濯機を動かしたりしているチャレンジャーです。
フリーランスのエンジニアで、業務内容はこんな感じ。
お仕事募集中だそうです(^^)
– サーバー構築
– ruby on railsを使ったwebアプリの作成
– サーバーへのセンサ値送信
– 既存システムとの連携プログラム作成
– Arduinoやraspberry piを使った初心者向けの出張講習
– 特定の機器やツールについて、使い方を解説したブログ記事を作成
感想
アイディアを形にできるって素晴らしいです!!
こういう面白いことがあるから、電子工作やめられないな〜・・・・
私も少しずつレベルアップしていって、役に立つものを作ってみたいです。
